


北京冬奥会开闭幕式地面舞台机械控制系统工艺设计
摘 要:
解析北京冬奥会开闭幕式重要演出设施地面舞台机械控制系统的总体工艺布置,分析主要设计难点,并提出解决方案。
地面舞台系统是第24届冬季奥林匹克运动会(以下简称:北京冬奥会)开闭幕式演出的核心设备,用于提供演出平面以及大型道具或演员的升降、进出通道,满足四场仪式不同演出、不同场景切换要求。
地面舞台系统紧紧围绕演出创意,尽量满足减小开合感觉、减小影响范围的要求,创新融合业内领先技术,采用半圆形升降补偿台与方形平移车台组合、南北同步对开的两套盖板,实现中心盖板先下沉、再平移“小开合”开盖的演出效果;采用主备电机冗余驱动和空间滑轮组同步传动,实现直径16 m、重约300 t的圆形中央升降台垂直托举道具或演员平稳升降的演出效果。其调配、驱动、管理和监控则有机械控制系统实施,应用效果会直接影响到演出成效。笔者将就地面舞台机械控制系统的总体工艺布置进行解析,分析主要设计难点,并提出解决方案。
1 地面舞台系统及其机械控制系统概况
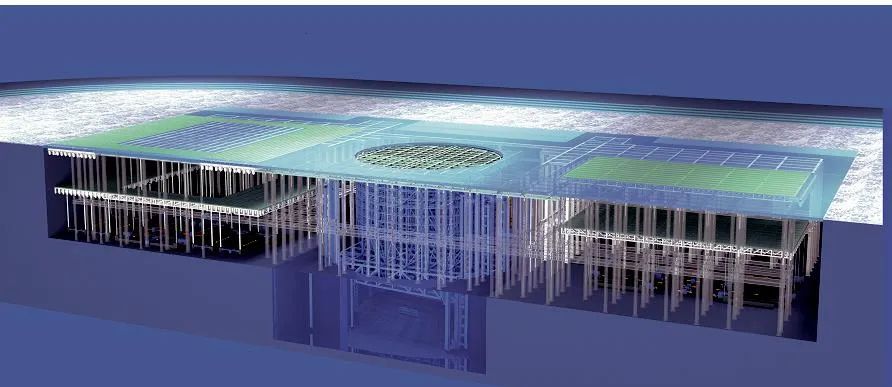
地面舞台系统布置在国家体育场场地内,占地面积约21 000 m2,主舞台区面积3 528㎡(84 m×42 m)、主体深度10 m,最大深度18 m;总质量约5 000 t,装机功率约2 000 kW,通过精确控制30组电机、20多条刚性链、24根约600 m钢丝绳及滑轮组件驱动7套大型升降台、车台、倾斜台等活动设备,如图1所示,完成各类升降、平移、翻转等动作,系统复杂、工程体量大。
针对舞台地面系统的机械控制需求,以及北京冬奥会演出舞台控制的高可靠性、高安全性要求,舞台机械控制系统采取的手段包括:
(1)采用以热冗余高可靠PLC为核心的DCS架构,整个系统采用分层控制设计;
(2)针对各机械机构的控制采用模块化、分离式设计,区分关联设备故障的相互影响,保证系统可靠性;
(3)系统以安全型电气回路为重点,设立完备的安全检测传感器、安全急停手段,使系统具备较强的安全监测防护能力,满足演出工况下的高安全性防护要求;
(4)系统采用多级变频器参数动态调整,实现大惯量多电机驱动高精度平稳控制,满足舞台平稳、快速、高精度控制要求;
(5)系统采用演出动作流程与程序代码分离的架构设计,演出流程动态编制,满足舞台演出流程的快速调整需求;
(6)系统电源采用主备电源系统分别独立实现供电的设计,同时主备电源分别采用三级配电、三级保护的系统架构,实现配电系统的高可靠性、高安全性;
(7)系统提供完备的状态监测能力,能够实时监控舞台机械系统的状态参数,为系统的快速诊断、决策提供良好的依据;
(8)系统具备自动控制、手动开环控制两种模式,实现在极端情况下的应急需要,保证演出任务不中断。
2 舞台机械控制系统架构
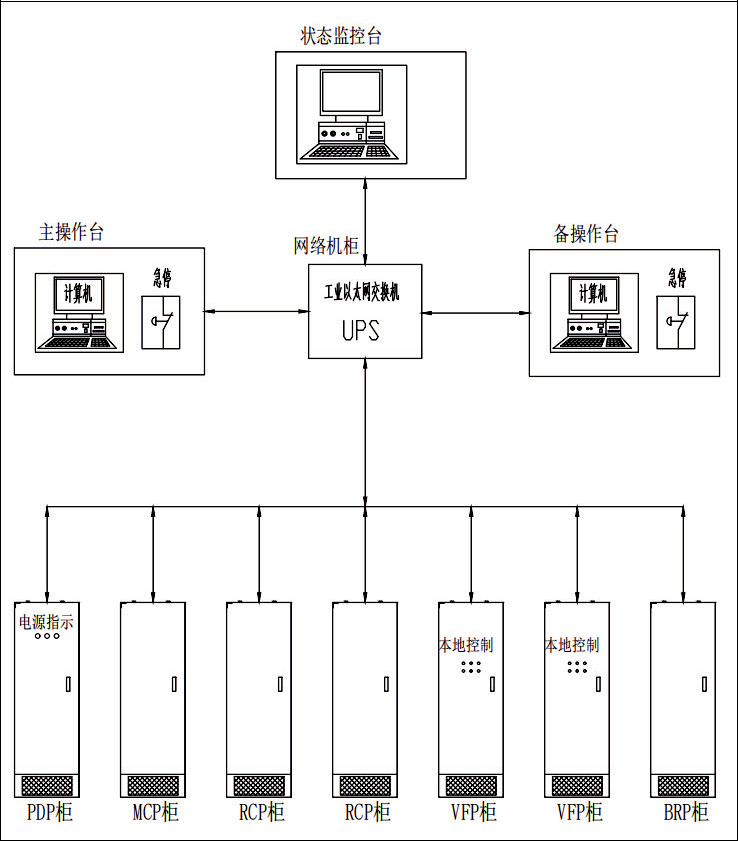
舞台机械控制系统的网络架构分为三层,如图2所示,分别为操作层、控制层、驱动层。

操作层由2台操作台、1台状态监测设备、双冗余环网、交换机组成。2台操作台一主一备,为用户提供演出流程编写、演出动作操作,保证操作的可靠性。状态监测设备为整个系统提供完备的信息监测,使操作人员能够快速掌握系统状态、快速决策。
控制层由2台热冗余的S7-414FH PLC组成,是整个系统的核心控制设备,能够实现单台PLC故障条件下的无缝控制切换,保证演出依旧可以顺利运行。
驱动层主要由变频器、ET200IO采集设备、交换机、电机、传感器等组成。每个设备均采用主备变频器、主备电机的冗余配置模式,保证在单套系统失效的状态下,仍可实现整个系统的工作。同时,提供了完备的手动控制能力,实现在极端情况下的应急操作功能。
控制层与驱动层之间采用PROFINET环网实现各设备之间的信息传输,速率可达到100 Mb/s,保障系统通信的实时性,以及出现网络单点故障时系统工作不中断。
3 电气系统的设置
电气系统主要由操作台( 2 台)、状态监测设备(1台)、UPS柜(5台)、电源分配柜PDP(6台)、控制配电柜( 1 台)、辅助配电柜( 1 台)、主控柜 M C P ( 1 台)、远程控制柜 RCP ( 7 台)、电阻柜 B RP ( 13 台)、变频柜 VFP ( 32 台)、变频控制柜VFKP(6台)、TB盒(18台)电缆网等组成,如图3所示。控制系统IO通道总共812路,其中输入664路,输出134路。
各柜体主要分布在-5 m及-8.5 m的配电室及总控室内,如图4所示。

操作台主要由工控机、显示器及其他附件组成,如表1、图5所示,各个模块间通过以太网传输数据,实现上位机之间的通信,用于接收用户输入、控制屏幕显示、向PLC发送运行命令。工控台采用双19英寸电容十点触摸显示屏,如图6所示,左边显示单个设备状态,如当前位置、所有限位开关状态、制动器开合状态、锁紧装置状态等;右边显示需重放的程序状态,如场景编号、走步代号、走步时间、停留时间等。
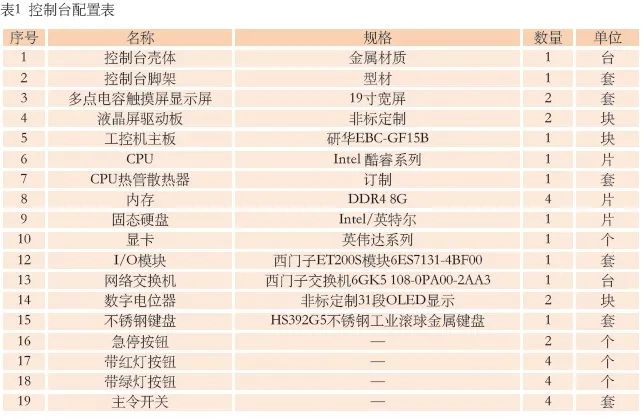

图5 操作台

图6 工控机界面
根据演出过程中各种工况的处理,操作台在集成以往成熟经验的基础上,进行了以下针对性的改进设计。
(1)操作区设置第一操作区与第二操作区,可分别独立控制不同的演出动作流程,实现对快速转换且无确定时序关系的适应性控制。
(2)每个操作区内设置主备操作按钮,两组按钮功能一致,保障单组故障时操作依然顺利进行。
(3)为防止误操作,操作台设置了投入转换开关,即不操作时可使相应的操作台转入非投入状态,从而使操作不能输出。
(4)为提高系统的可靠性,操作台按钮相关操作数据不通过操控台计算机,而是通过PN总线直接传输到PLC处理,从而简化中间环节,即使操作台计算机发生故障,通过按钮依然可以操作系统正常工作。
UPS柜主要由互投开关、24 V开关电源、隔离变压器和UPS组成,用于电机抱闸供电、柜内直流24 V照明、控制电的不间断供给。
互投开关采用双电源自动切换开关(Automatic Transfer Switch,ATS),上端分别由主备电源柜供电,确保在主备电源任何一路有电时下端设备都有电源供给。下端连接的设备主要有电机抱闸和24 V开关电源。
24V开关电源为各个柜体内的散热风扇及柜内照明灯供电。
隔离变压器将控制配电柜(CPDP)供应的AC380 V电源变为AC220 V供给UPS,再由UPS分配给各个柜体的控制电。
电源分配柜分为PDP(电源分配柜)、APDP(辅助电配电柜)和CPDP(控制配电柜)。电源分配柜主要由母线配架、母线连接器、断路器、变压器、24 V开关电源、以太网通信模块和交换机组成。
各个电源分配柜主要根据不同地方设备用电的需求,摆放在多台变频器柜之间。
主控柜用于安装PLC(可编程控制器),其通过网络远程采集变频器的信号并发送信号给变频器驱动电机运行。远程控制柜主要接收信号并传输到PLC的中央处理(CPU)进行综合逻辑判断,确认设备的可运行性。
该项目采用的西门子PLC内部为双机配置,实现热备冗余运行,可避免PLC单模块故障引发停机等事故,方便系统在线维护、升级,提高系统平均无故障时间,缩短平均故障修复时间。
远程控制柜主要由PLC分布式子站及相应的附件组成,柜内设备主要为继电器、断路器、熔断器。远程控制柜在处理相关安全信号时会根据信号的安全等级判断是否需要断开硬件连线,从而起到安全保护作用。
变频柜(VFP)主要由变频器及相应的附件组成,采用了配备CU320控制器的SINAMICS S120电机驱动系统,如图7、图8所示,满足高调速比的要求。
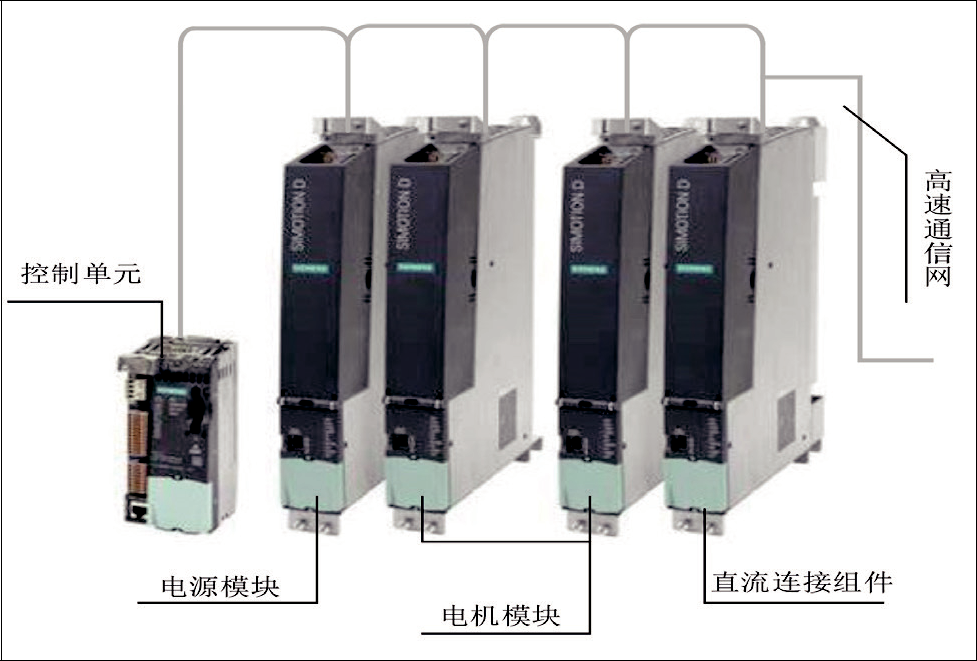
图7 S120电机驱动系统
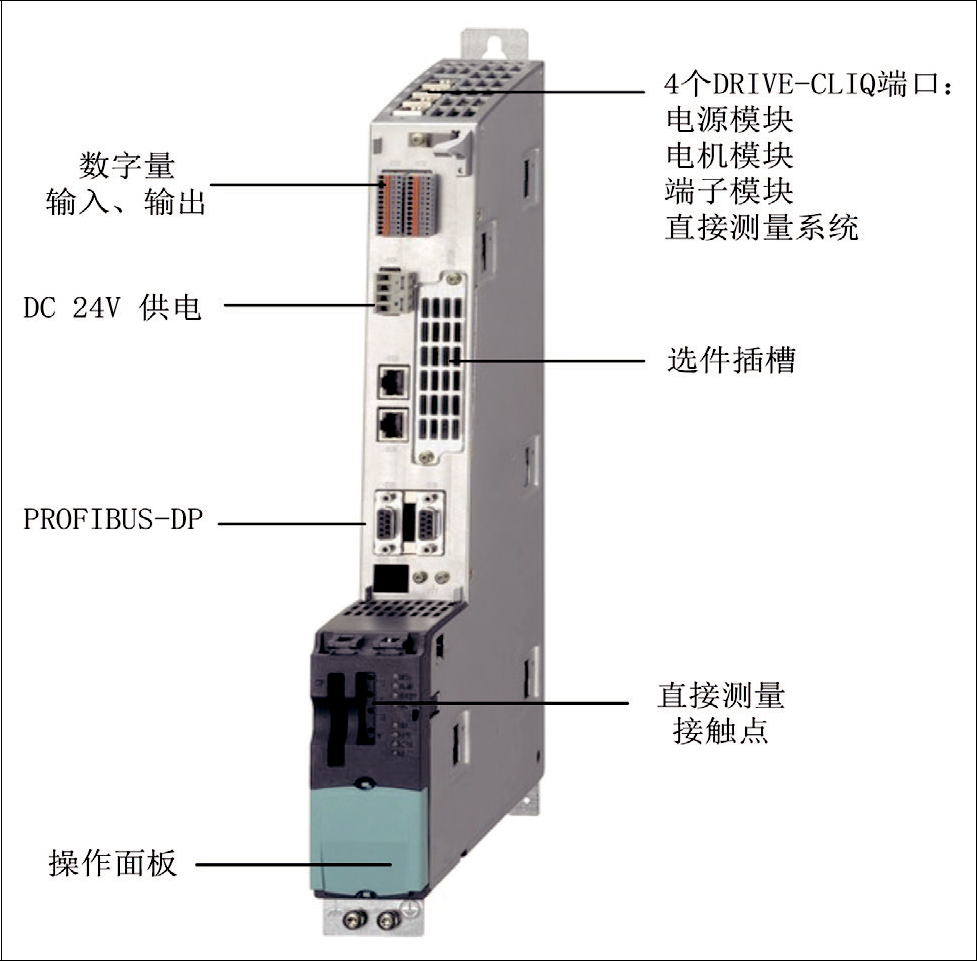
图8 CU320控制单元
SINAMICS S120是集V/F、矢量控制及伺服控制于一体的驱动控制系统,不仅能控制普通的三相异步电动机,还能控制同步电机、扭矩电机及直线电机,具有模块化设计,可以提供高性能的单轴和双轴驱动,满足应用中日益增长的轴数量和性能的要求。
制动电阻柜主要由制动电阻组成。在升降台下降以及盖板制动过程中,需要制动电阻消耗变频器反馈回来的能量。变频器需要制动电阻近距离安装,因此制动电阻柜靠近变频器柜摆放。
4 驱动设计
系统驱动使用变频器驱动升降台及盖板等设备,采用双变频驱动主备电机,主备电机的控制采用手动切换。
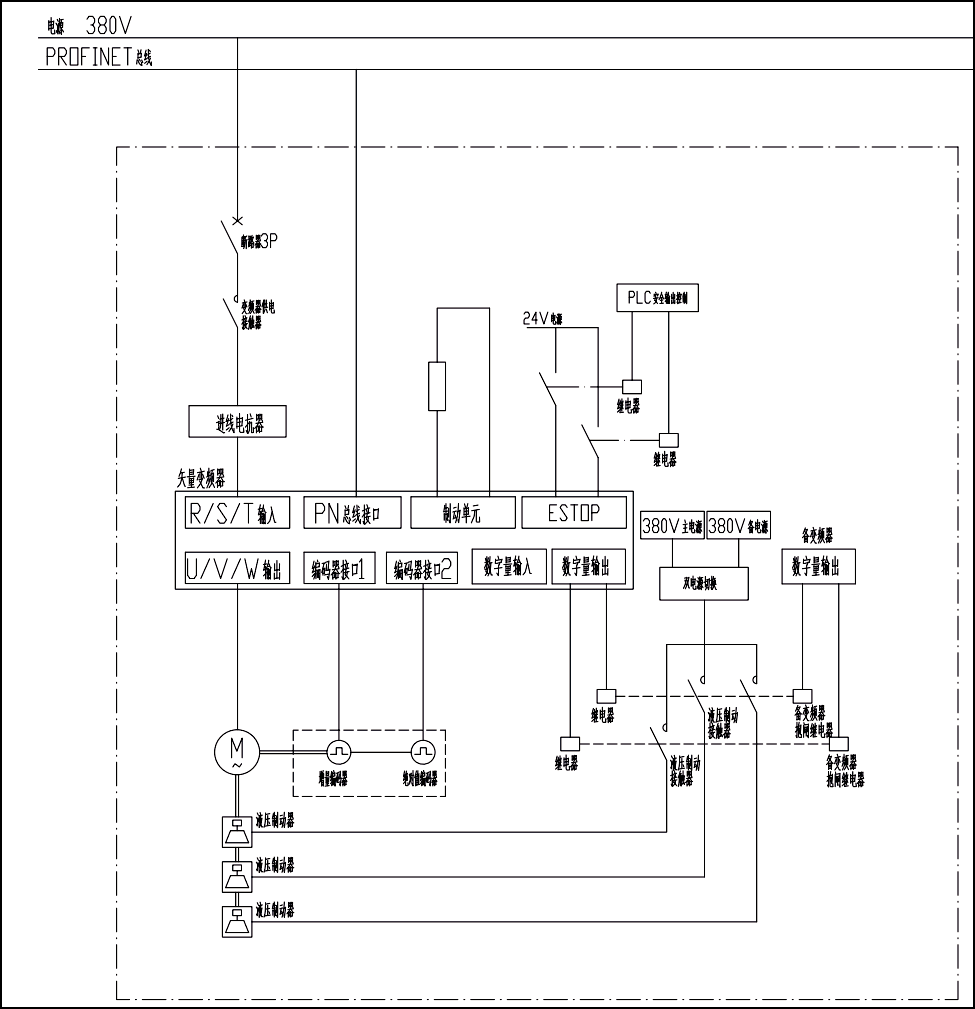
变频器的逻辑控制原理如图9所示,在执行部分,每台电机均配置了编码器,并将信号反馈至变频器内部。变频器通过EMC滤波器以及前置的接触器将380 V电压引入其中,为其提供动力。而在控制命令输入方面,西门子PLC通过PROFINET总线协议接入变频器,变频器也受安全PLC的输出控制,根据上位机的命令控制电机、制动器以及抱闸执行的相关动作。
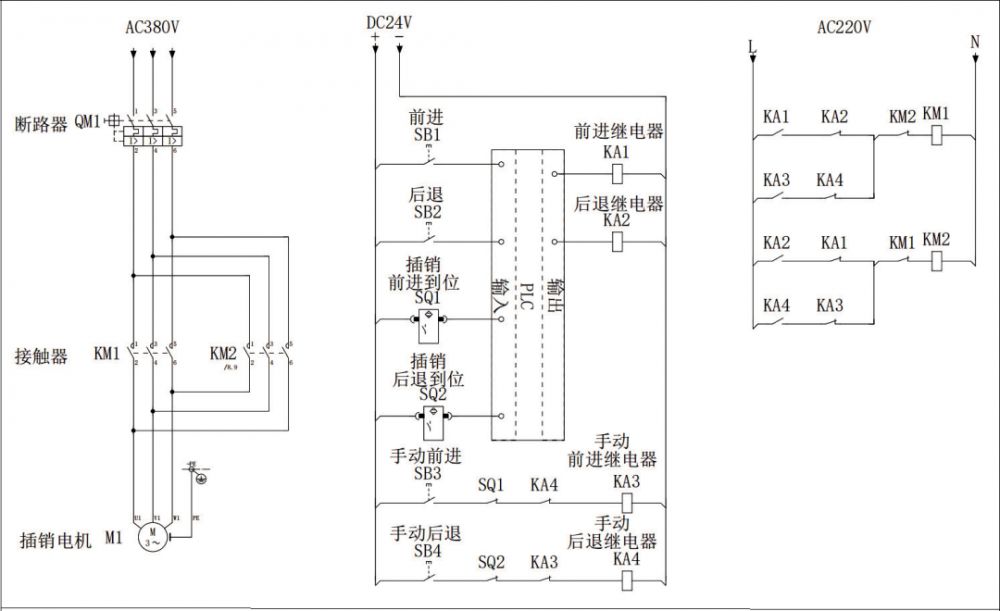
电动插销驱动设计如图10所示,实现自动与手动控制同时存在的方式,驱动相关插销进行动作。
5 软件设计
控制软件根据在系统中使用层级的不同划分,各个部分软件的汇总如表2所示。

针对导演创意、舞台演出流程快速调整的需要,上位机控制软件主要是完成各控制对象的参数、动作流程参数、演出时序的设置,以及相关对象、演出动作流程动作等状态的展示,如图11所示。同时具备应急操作功能,在上位机控制软件界面实现了不同控制对象主备变频器的快速切换。
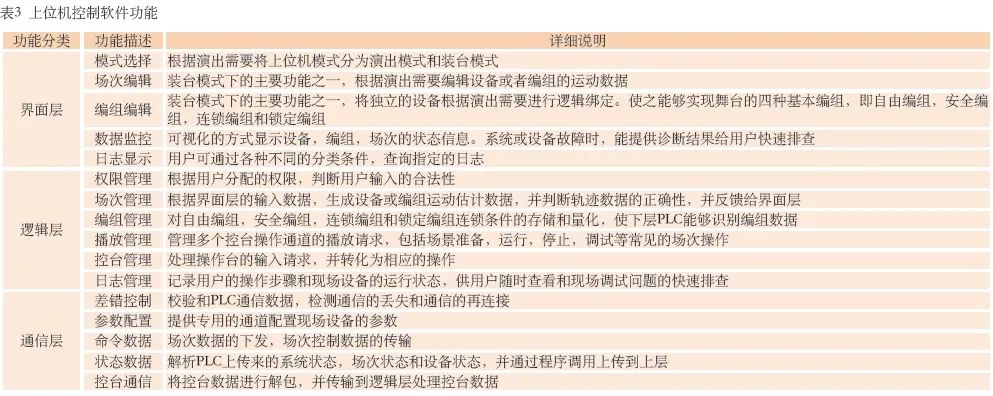
上位机控制软件通过分层设计的方式,将整个软件分为界面层、逻辑层和通信层三个部分,各层的功能见表3。其主界面分为八个区域,相应的功能分别包含:本机软件的名称和系统时间;设备的操作、状态的显示和系统状态的显示;设备、剧目选择的相关界面;显示软件当前运行状态和用户的操作信息;剧目管理、设置配置、系统选项。主界面在不影响操作的情况下,可对设备参数进行监控。
PLC软件主要是结合上位机控制软件将演出的动作组合传递到驱动系统运行,发送速度、位置等控制指令给变频器实现不同的动作流程,实时运算处理设备间的互锁逻辑、停车逻辑,监测电机的运行状态、故障状态反馈到上位机控制软件。
PLC功能分常规部分和安全部分,常规部分实现舞台功能的主要逻辑,安全部分实现驱动器级别的故障安全功能,如图12所示。
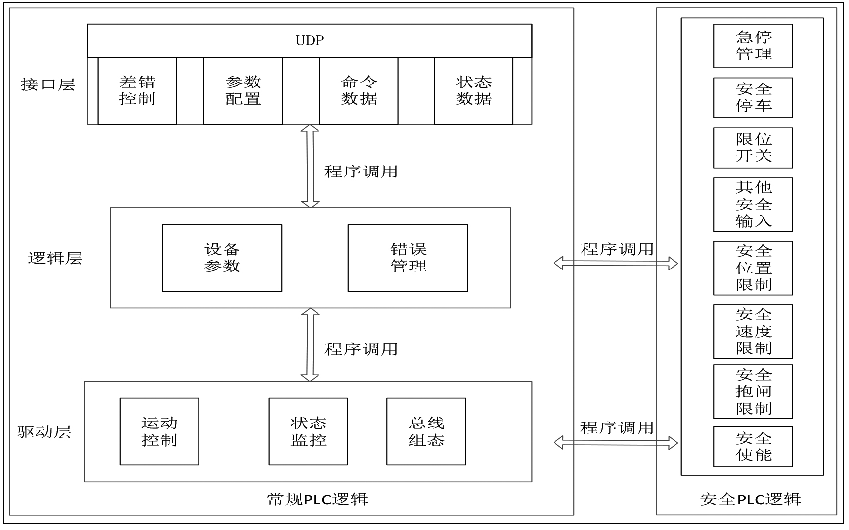
根据PLC接收上位机命令、下发下位机的运动命令的功能,其软件功能详见表4,主要包括:接收并验证操作台的数据,解析数据,将状态数据发送给操作台;实现单个设备的运动控制并监控运动控制的状态;检测设备的安全相关逻辑,确保设备能够在出错的情况下实施停车等。

总线自动控制:上位机通过西门子标准报文控制变频器实现回零、MDI运行、Gear运行、故障复位等控制。
柜门手动控制:包含手动上升、手动下降、4个预置位置的启停、选择运行轴、报警复位等操作,主要用于总线自动失效后应急操作。
通过软件配置实现端子控制变频器SS1停车;柜门手动控制和总线自动控制之间的快速切换;关闭第二编码器报警,并保留第二编码器功能,减少运行过程中的故障点;将变频器的两个编码器的位置、编码器反馈速度、变频器输出电流、变频器母线电压、变频器温度、变频器的状态等信息通过总线反馈给上位机,方便对设备状态信息进行监控和诊断。
状态监测软件是控制系统的配套软件,与上位机控制软件配合使用,为控制系统提供人机监测界面,通过与PLC进行通信实现与控制系统、动力系统等信息交互,获取整个系统的实时状态,实现对设备进行整体监测的功能,用以判断整个系统的实时情况。
状态监测软件的主要功能是读取控制系统中采集的数据、操作台系统监测、设备数据监测、设备运行数据监测等信息,建立监测设备可视化模型,直观查阅设备资料信息、关键测点监测结果和报警情况信息,并且对于重要参数信息进行记录,方便调取查阅,对于错误指令或者故障情况按照时间、级别进行显示与归档便于按需触发故障复位、检修计划等,处理结果及时反馈,实现异常管理闭环。
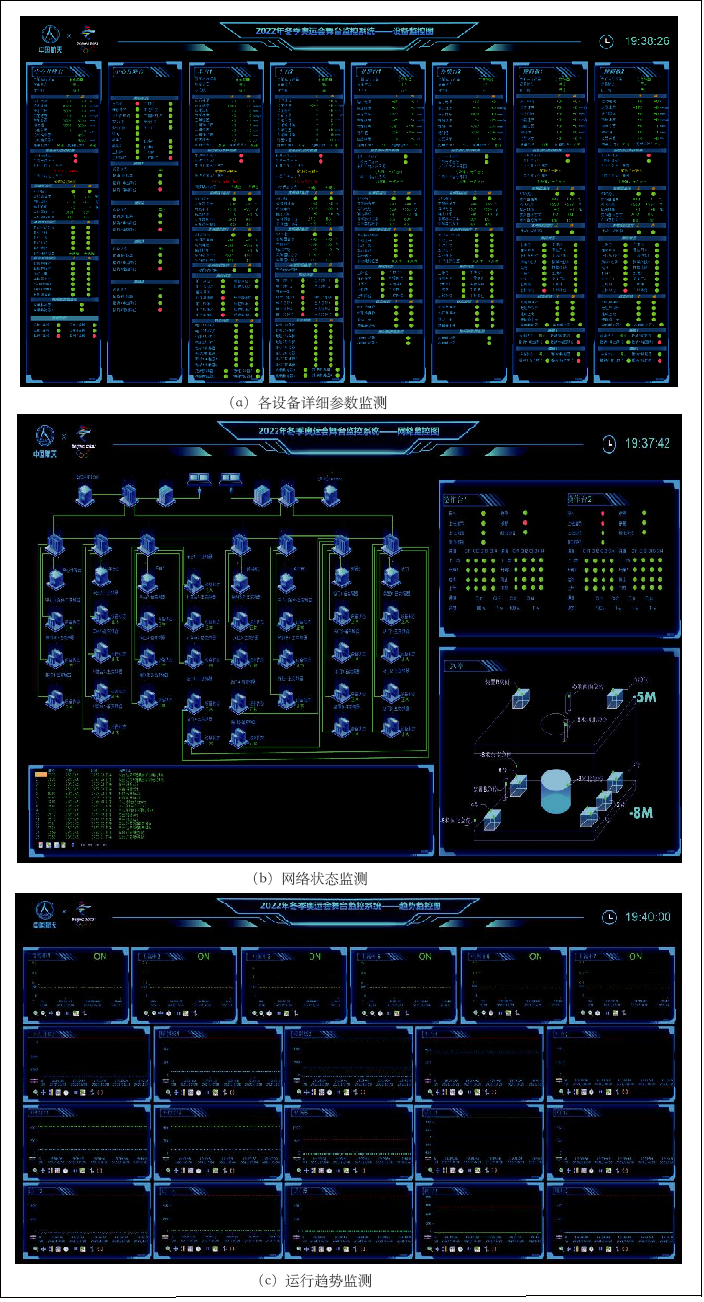
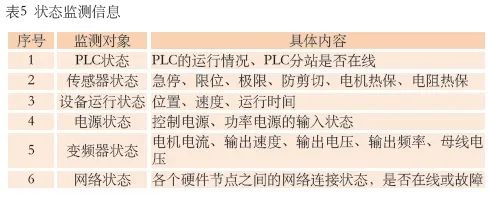
状态监测软件运行目标机为一机六屏,界面如图13所示,主要监测信息如表5所示。一号屏幕运行网络监测界面,包含主控台与报警视图,可以根据时间与编号,并且向监测人员报告当前上位机人员操作步骤,以及各网络状态与系统急停检测点指示,包含了所有设备的可视化状态及参数。二号屏幕为设备可视化,可以清晰明了看出设备大致存在的空间位置与状态。三号屏幕为设备详情监测视图,包含了所有设备的详细状态,包括变频器状态、限位状态等。四号屏幕为装置B与活门设备详情页面,包含装置B与活门设备的详细状态。五号屏幕为运行趋势图,是以电源电压、设备当前位置、当前电流等详细数据为数据轴,用时间轴的方式绘制的直观数据曲线。六号屏幕为流程图,展现各个设备的启动前安全条件检查、启动后安全情况检查。
6 系统电源设计
系统供配电为驱动系统的主、备设备提供功率供电、控制供电和空调照明的辅助供电,采用三级配电、三级保护的系统架构。根据舞台设备的用电时序,梳理出同时运行和先后运行的设备,采用主、备驱动设备交叉供电,避免同一舞台设备的主、备驱动用同一路市电而出现导致主、备驱动都不能使用的风险。通过降额、冗余、电磁兼容等设计,保障舞台供电安全和可靠。
市电提供四路供电,其中第1路、第2路为主供电,第3路、第4路为备供电。每一路提供2个供电接口。
控制供电采用在线式UPS不间断电源,给计算机、控制柜、驱动柜控制单元等供电,保障市电断电情况下控制系统可以正常运行。其组成包括隔离变压器(380/220)、断路器、UPS和蓄电池组等。低压直流供电为系统提供+24 V直流电源,采用双电源冗余设计,具有短路、过流、过压、欠压等保护功能。
7 系统接地
系统中的所有驱动都采用变频器驱动控制,变频器的输入和输出侧的电压、电流含有丰富的高次谐波,是强干扰源,对其他电子设备产生干扰。因此使用变频器既要防止它干扰外界,又要防止外界对它的干扰,即电磁兼容(EMC)。
从电磁干扰(Electromagnetic Interference,EMI)传播途径可以看出,接地是抑制干扰最有效、经济的手段。变频驱动系统接地包括保护接地、工作接地和屏蔽接地。
(1)保护接地:用于保护人身安全和设备安全;正常情况下没有电流流过,没有这个接地设备也可正常工作。如设备金属外壳的接地、防雷接地、PE接地等。
(2)工作接地:为电子电路和电气系统提供零电位基准,也对电气设备提供保护作用;没有这个参考点,系统无法正常工作。如变压器的中性点、有信号交换的设备之间的“等电位连接”。
(3)屏蔽接地:控制EMI,为电噪声提供流向大地的低阻抗通路,能够降低电磁干扰或将电磁干扰隔离在封闭空间内。如电缆屏蔽层的接地、电气柜内安装背板的接地、柜门的接地等。
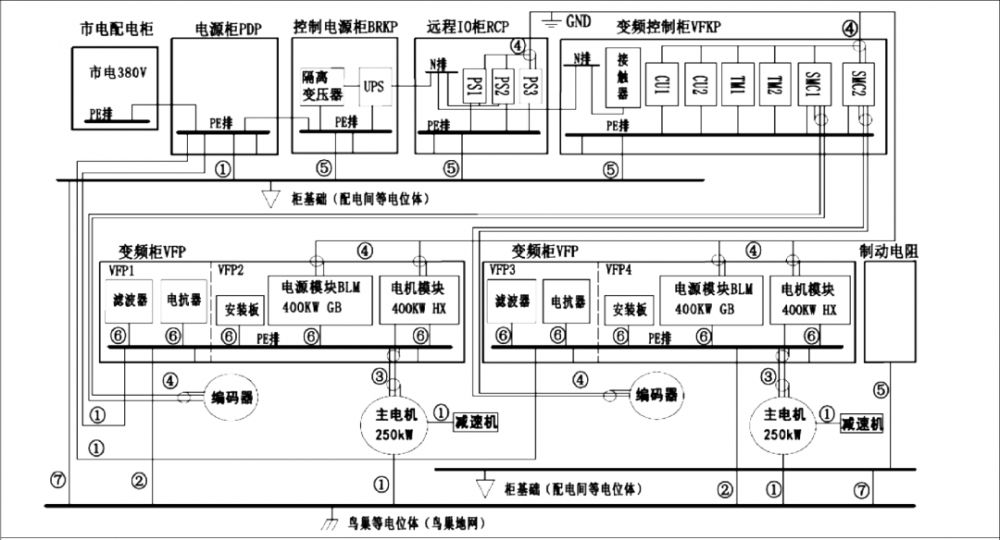
从电气安全和电磁兼容考虑,对地面舞台大功率电机变频驱动系统进行接地设计,如图14所示。
8 结语
舞台机械控制系统采用多级冗余(操作层、控制层、网络层、驱动层)的方式,增加了系统的可靠性,保障系统正常运行;控制用电在接入端采用隔离变压器实现电气隔离;抱闸电源采用主备自动切换电源自动切换方案;采用新型冗余控制系统,有效地解决了在重大演出活动中舞台机械设备演出保障的难题。由于采用了多级冗余结构,从而将设备出现意外情况进而影响演出效果的风险降至最低,提高了设备使用时的可靠性。
选自 2022年《演艺科技 冬奥特刊》 王 铂,张向文,田 凯,张月飞《北京冬奥会开闭幕式地面舞台机械控制系统工艺设计》。转载请标注:演艺科技传媒。更多详细内容请参阅《演艺科技 冬奥特刊》。
(除原创作品外,本平台所使用的文章、图片、视频及音乐属于原权利人所有,仅用于行业学习交流,并不用于商业用途。文中观点为作者独立观点,因客观原因,或会存在不当使用的情况,如,部分文章或文章部分引用内容未能及时与原作者取得联系,或作者名称及原始出处标注错误等情况,非恶意侵犯原权利人相关权益,敬请相关权利人谅解并与我们联络第一时间处理,共同维护良好的网络创作环境。)
 京公网安备 11010102001495号
京公网安备 11010102001495号